Portfolio
LuminaX
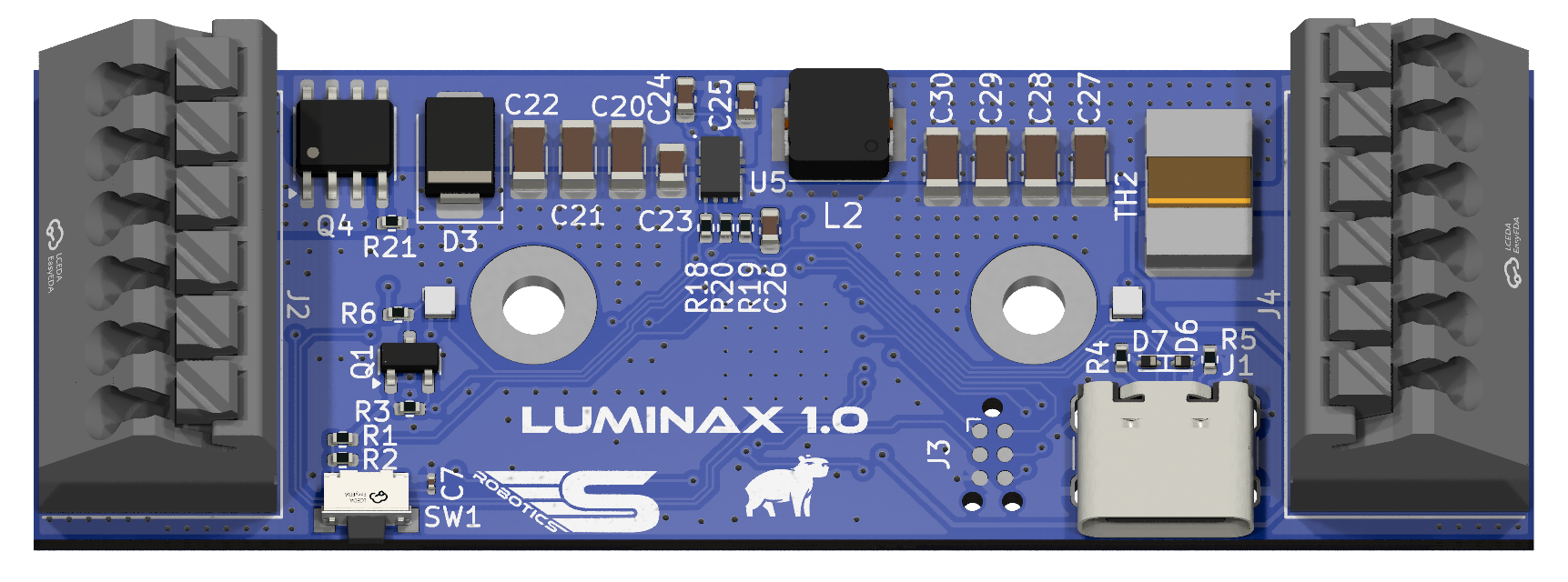
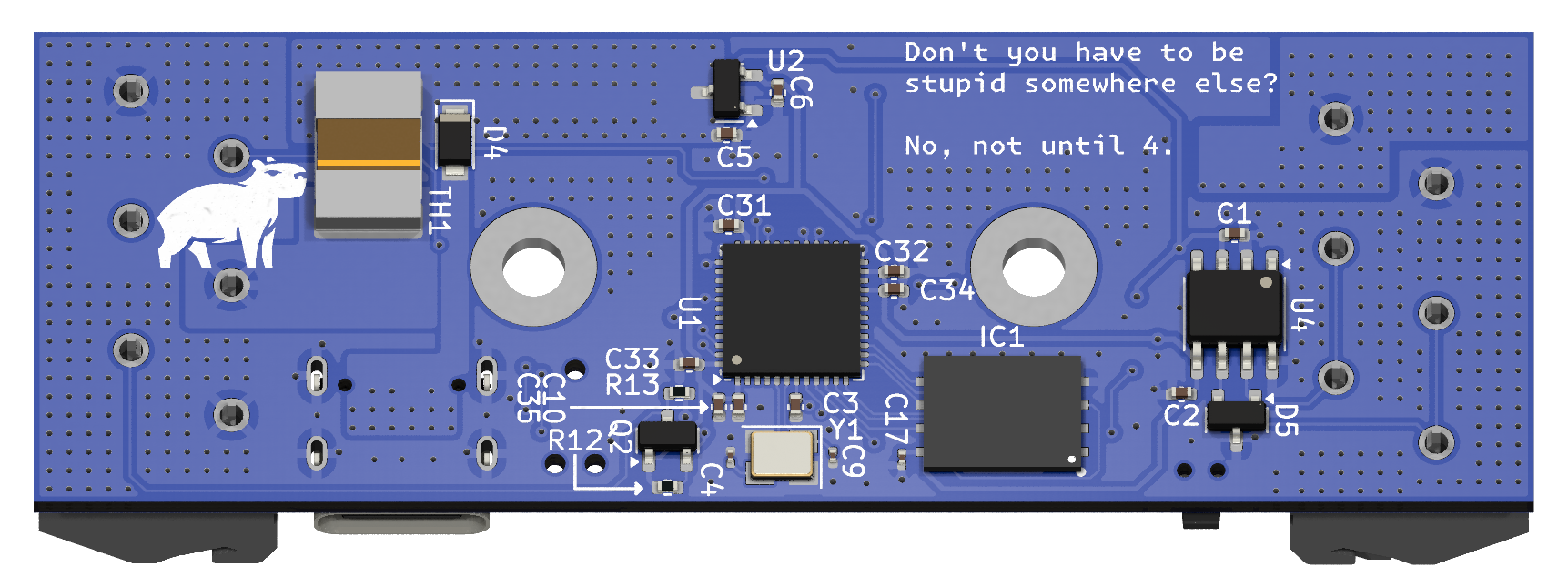
LuminaX is an addressable LED controller which supports both pre-defined and programatically controlled animation sequences. It is designed to be controlled over a CAN 2.0B / FD bus, and can supply 5V up to 8A continuously for LED power.
LuminaX has been a pet project of mine that introduced me to the world of custom electronics and unfortunately gets sent to the back-burner over other for-profit projects. I do hope to finish it one day though!
Ranger
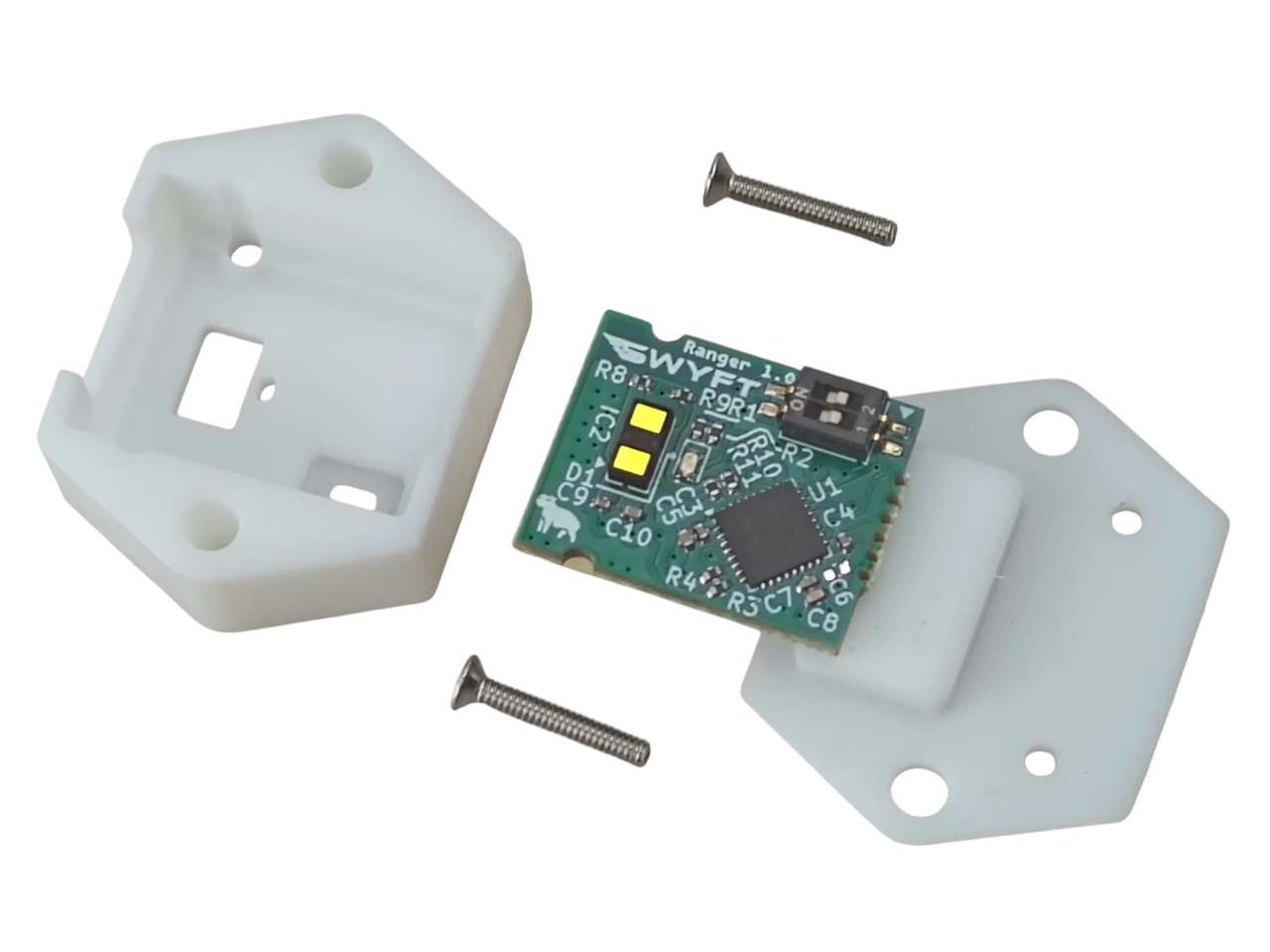
Ranger is a Time-of-Flight sensor, with pre-configured modes to allow for the easist integration into existing or new designs.
Ranger incorporates mixed-signal design using both digital and analog output capabilities along with on-board computation for a stable and reliable output.
Click here to learn more about Ranger.


CANnect
CANnect is a wiring solution aimed to reduce the amount of wires and complexity when wiring a FRC robot.
CANnect uses common twisted-pair category cabling to provide both power and data via 802.3af (although a CAN bus is the intended data protocol).
Click here to learn more about CANnect.
LuminaX
LuminaX is an addressable LED controller which supports both pre-defined and programatically controlled animation sequences. It is designed to be controlled over a CAN 2.0B / FD bus, and can supply 5V up to 8A continuously for LED power.
LuminaX has been a pet project of mine that introduced me to the world of custom electronics and unfortunately gets sent to the back-burner over other for-profit projects. I do hope to finish it one day though!
Ranger
Ranger is a Time-of-Flight sensor, with pre-configured modes to allow for the easist integration into existing or new designs.
Ranger incorporates mixed-signal design using both digital and analog output capabilities along with on-board computation for a stable and reliable output.
Click here to learn more about Ranger.
CANnect
CANnect is a wiring solution aimed to reduce the amount of wires and complexity when wiring a FRC robot.
CANnect uses common twisted-pair category cabling to provide both power and data via 802.3af (although a CAN bus is the intended data protocol).
Click here to learn more about CANnect.

Tigerbotics FRC 2022
Our robot, Ein, was designed for the FIRST Robotics Competition - Rapid React.
Ein made it all the way to the FIRST in Texas District Championship - which is the farthest the team has ever gone to-date.
Ein was our first "command-based" robot meaning the robot operates essentially from a giant state-machine with many interconnected subsystems.
You can view Ein's source code here.
Tigerbotics FRC 2023
Our robot, Killua, was designed for the FIRST Robotics Competition - Charged Up.
Killua competed in 2 FIRST in Texas district level events, and then again at the Texas Robotics Invitational summer offseason event.
Killua was likely our most advanced robot to-date and such has large amounts of routines and automations to control the actions of it.
Killua is also a "command-based" robot. The robot continuously runs finely-tuned profiled PID controllers on all 3 degrees of freedom - the elevator, arm, and wrist. Killua is also able to automatically intake gamepieces using a current monitoring strategy.
Killua's source code is available here.

Spring & point-mass simulation
A take-home lab from my differential equations class.
The goal was to find physics constants (point-mass, drag coefficient, gravity, spring constant, natural length, etc.) to produce a stable pyramid built with 3 point-masses all interconnected with springs.
The simulation I designed is actually able to run on any arbitrarily defined point-masses and spring connections.
You can play with the notebook here.
Tigerbotics FRC 2022
Our robot, Ein, was designed for the FIRST Robotics Competition - Rapid React.
Ein made it all the way to the FIRST in Texas District Championship - which is the farthest the team has ever gone to-date.
Ein was our first "command-based" robot meaning the robot operates essentially from a giant state-machine with many interconnected subsystems.
You can view Ein's source code here.
Tigerbotics FRC 2023
Our robot, Killua, was designed for the FIRST Robotics Competition - Charged Up.
Killua competed in 2 FIRST in Texas district level events, and then again at the Texas Robotics Invitational summer offseason event.
Killua was likely our most advanced robot to-date and such has large amounts of routines and automations to control the actions of it.
Killua is also a "command-based" robot. The robot continuously runs finely-tuned profiled PID controllers on all 3 degrees of freedom - the elevator, arm, and wrist. Killua is also able to automatically intake gamepieces using a current monitoring strategy.
Killua's source code is available here.
Spring & point-mass simulation
A take-home lab from my differential equations class.
The goal was to find physics constants (point-mass, drag coefficient, gravity, spring constant, natural length, etc.) to produce a stable pyramid built with 3 point-masses all interconnected with springs.
The simulation I designed is actually able to run on any arbitrarily defined point-masses and spring connections.
You can play with the notebook here.